激光雷达产业链
激光雷达
激光雷达属于感知设备,其通过发射接收激光束,实现对外界环境的3D建模。激光雷达不断向外发射激光束,并接收物体反射回的光脉冲,根据已知光速计算出两者信号之间的时间差、相位差来确定车与物体之间的相对距离,再通过水
平旋转扫描或相控扫描测量物体的角度,通过获取不同俯仰角度的信号获得高度信息。感知到与物体之间的距离、角度等信息后,再通过软件算法去做 3D 建模,构建一个机器能够理解的虚拟模型。

激光雷达分类:一般分为机械式、半固态、固态。机械式多用于无人驾驶,其体积大、价格高,不适合量产车。高级辅助驾驶汽车上目前以转镜、MEMS的半固态激光雷达为主。中长期随固态激光雷达技术逐渐成熟,有替代半固态的可能性。
激光雷达组成:主要包括激光发射、接收、扫描、信息处理四个子系统。从核心零部件上看,激光雷达由发射器,接收器,配套的芯片,以及光学扫描件构成。激光雷达厂商负责整体设计,绝大部分零部件外购。外购的零部件有激光器
(发射器主要部件)、探测器(接收器主要部件)、芯片,光学部件由激光雷达厂商自主研发设计,再由代工厂生产加工。
自动驾驶传感器主要包括摄像头和雷达:1)摄像头:利用计算机视觉判别周围环境与物体,判断前车距离;2)雷达:分为毫米波雷达、激光雷达、超声波雷达三类,利用发射波和反射波之间的时间差、相位差获得目标物体的位置和速度等数据。当前 L2 级自动驾驶感知系统主要由超声波雷达、毫米波雷达、摄像头等传感器组成。
性能方面:激光雷达探测距离远,测量精度是毫米波雷达的 10 倍,可以对物体 3D 形状精准刻画,毫米波雷达和超声波雷达受限于精度,区分不了缓慢移动的人和其它静止物体。
成本方面:摄像头与毫米波雷达成本单价通常在 200 美元以内,激光雷达价格在8000-75000 美金不等,远远高于其他传感器,这也是掣肘激光雷达迈向商业化的瓶颈。
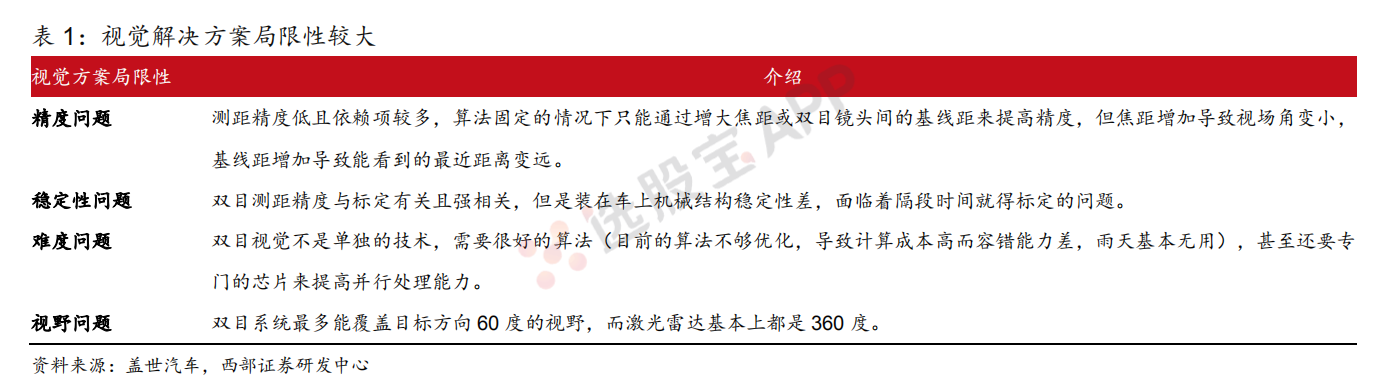
摄像头主导的纯视觉解决方案:由摄像头主导,配合毫米波雷达等低成本传感器组成构成纯视觉计算,典型代表为特斯拉、Mobileye 和国内唯一自动驾驶纯视觉城市道路闭环解决方案百度 Apollo Lite。特斯拉自建芯片和算法团队,认为通过视觉系统优化自身 AI 算法就可以达到较高的智能驾驶水平。由于纯视觉方案存在精度、稳定性和视野等方面的局限性,无法满足 L3 级以上自动驾驶对于传感器的性能要求,曾经同样以视觉为核心的 Mobileye 在 2025 年自动驾驶汽车传感器系统发展计划中提出了将使用内置的激光雷达传感器。
激光雷达主导的强感知方案:该方案由激光雷达主导,配合摄像头、毫米波雷达等传感器组成,典型代表企业为 Waymo、Uber、百度 Apollo 等科技和出行公司。Waymo定位 Robotaxi,直接瞄准 L5 智能驾驶,所以采用 5 个激光雷达去保证车辆安全,Waymo 针对 2B 市场,主要目的是积累运营经验数据,随着未来激光雷达成本下降可以大规模推广。对于特斯拉之外无法通过 AI 弥补硬件缺陷的汽车厂商而言,采用更多类型传感器是更好的选择。奥迪之后,其他主流车厂都推出激光雷达方案,戴姆勒、保时捷、宝马、蔚来都投资了激光雷达公司。
按照扫描方式,激光雷达可以分成机械和固态激光,固态激光包括 MEMS、OPA、Flash、棱镜、转镜等,固态激光雷达目前主要采用 MEMS、Flash 和 OPA 方案
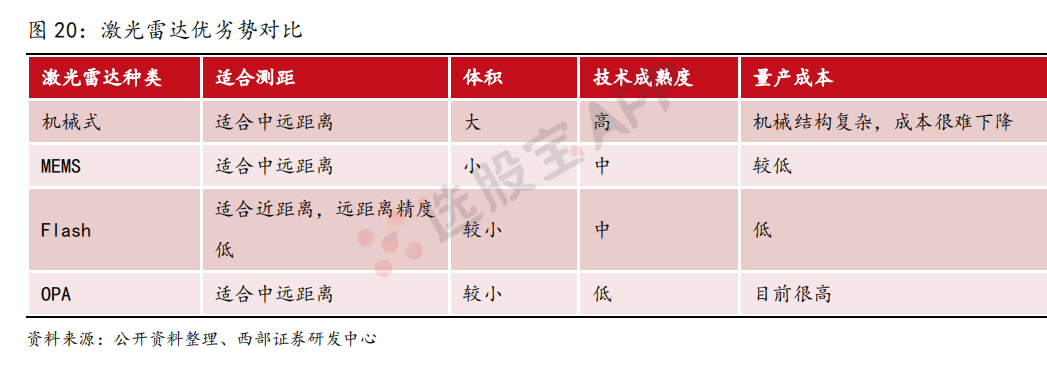
机械式激光雷达:优点是线别丰富(有 64 线、32 线,16 线、8 线、4 线不同的价格层次),性能高(可以实现 360 度高速旋转),劣势是体积大、成本高、验证时间长。机械式激光雷达是目前 Robotaxi 的主流方案,Waymo 自研的 Honeycomb 依然是传统机械式构造。海外市场以 Velydone 为主,国内玩家有禾赛、速腾。
MEMS(混合固态激光雷达):MEMS 激光雷达使用微振镜替代机械式产品中的宏观扫描仪,将机械部件集成到单个芯片。根据 MEMS 咨询估算,机械式雷达每组芯片成
本约 200 美元,仅 16 组芯片成本已高达 3200 美元,因此 MEMS 方案可以大幅降低成本和体积。同时由微振镜反射激光形成较广的扫描角度和较大的扫描范围,可以形成更多的点云,有效克服了机械式激光雷达在寿命和良品率方面的不足。MEMS 方案是目前激光雷达市场的最主流方案。代表公司为 Luminar 和 Innoviz,其中 Luminar有 Iria 和 Hydra 两款产品亮相,Ira 预计 2022 年量产,L3+激光雷达售价约 1000 美元/个。Innoviz 第一代产品 InnovizOne 最远探测距离 250 米,已经获得宝马订单,最新发布的 InnovizTwo 比 InnovizOne 成本下降 70%。
OPA:OPA 取消了机械结构,激光控制集成在一块 OPA 芯片,结构简单,体积更小,可以动态控制扫描频率、分辨率和焦距调整,同时多线多维扫描能获得更高的数据采集率。但另一方面,采用 OPA 路线的企业需要自主研发芯片,上游核心电子元器件、技术支持不成熟,制造工艺复杂,短期产业化难度大。Quarnergy 是最早提出 OPA 方案的公司,Quarnergy 的 S 系列是业内首款 OPA 架构的激光雷达,但目前尚未落地。
Flash:Flash 激光雷达类似数字照相机,用单次激光脉冲照亮目标环境,对抗震要求极高,同时发射高功率单次激光脉冲,需要对光源能量、发射方式进行创新,成本较高。Flash 激光以 LeddarTech 为代表,但采用 1064nm 激光功率,并且没有采用昂贵的 SPAD 方案,因此功率和灵敏度受限。
棱镜:采用非重复扫描方式,类似视网膜的中央凹,通过对两个棱镜转速的调整,激光雷达会获得不同扫描图案,时间越长,点云密度越高,对场景的还原度越好。大疆独创的双棱镜方案,预计明年在小鹏新车上量产。